where ξ(∙) is a 2D Gaussian weighting function, (i, j) spatial coordinates in the input map I, ω denotes the smooth region map, and λ0 is the threshold to discriminate between smoothing and non-smoothing, and we take it to be 1.
Perhaps there may be false detections in some regions, but they will be excluded by other clues of banding artifacts. In our experiments, this smooth judgment can well detect the location of banding pixel, which is computationally effective and can meet our demands.
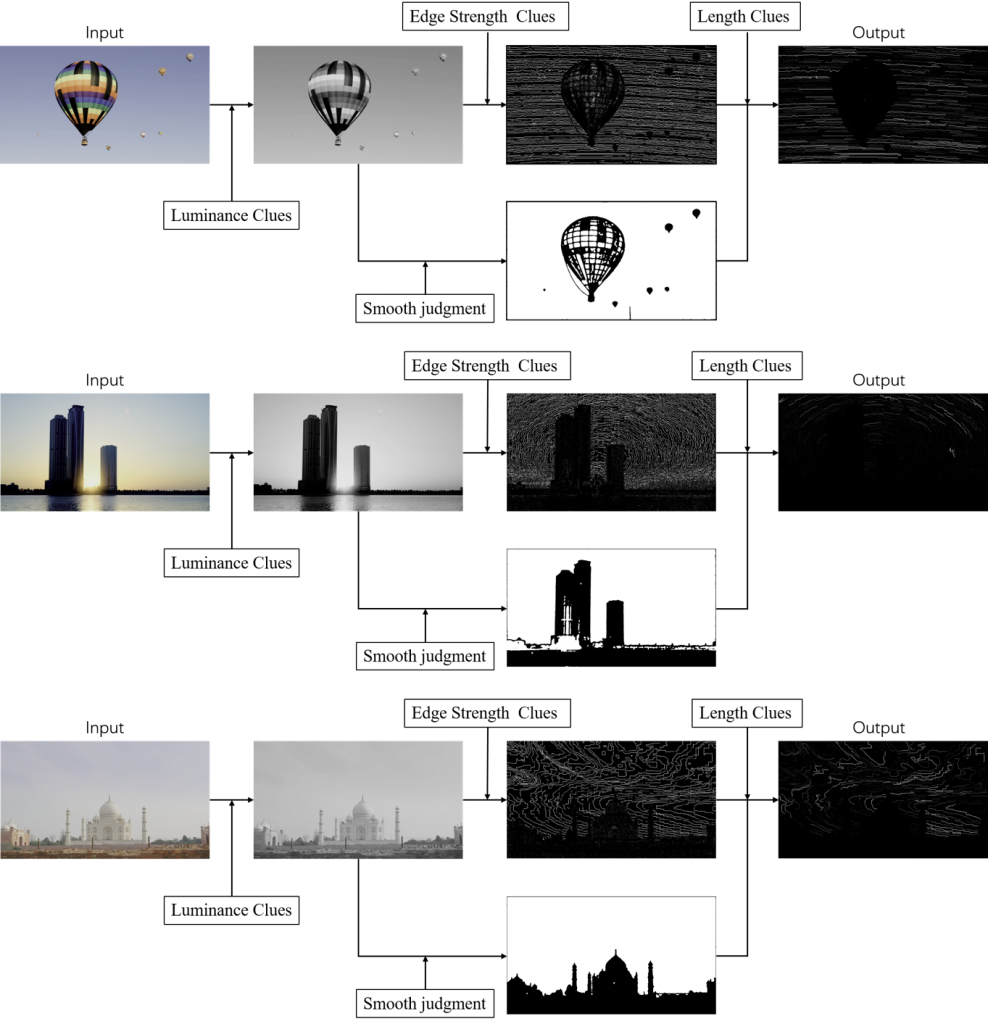
(2) Similar to the edge detector, we do not wish to exclude other solutions of smooth region detection in the proposed framework. Some examples of our smooth judgments are in Fig 5 Based on these operators, we can use multi-scale matching to ensure that the regions on both sides of the banding are smooth regions. The following is the details, which demonstrate its effectiveness. Since the focus of this manuscript is not on smooth region detection, we do not investigate different smooth discriminators.